

During laying out the hose of the Big Bubble Barrier, the DP2 system is used. The correct position of the nozzle hose on the seabed is the condition for the Big Bubble Barrier’s successful functioning. HYDROTECHNIK LÜBECK uses the Dynamic Positioning System, DP2 for this purpose. During operation, the rising bubbles must always completely enclose the pile. Waves and currents are crucial factors to consider when positioning.
Computers control the ship
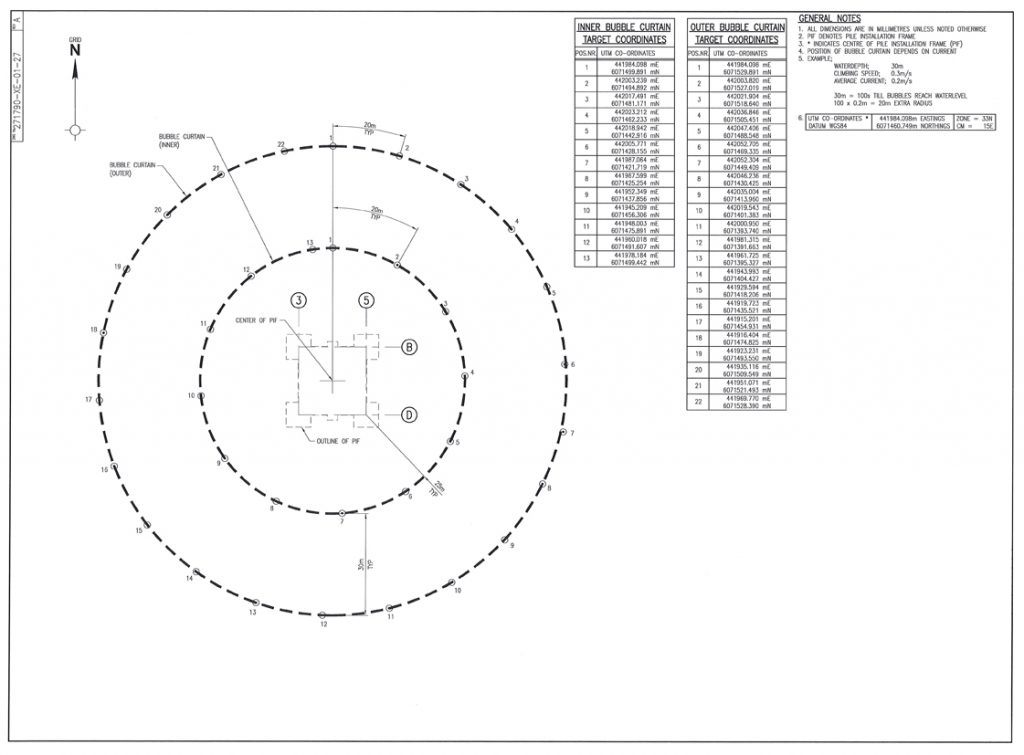
Weather, wave, and flow data are collected first. The hose is then virtually laid in a drawing around the ramming point. This results in the length of the nozzle hose, the number of compressors, and the ship’s size. This drawing is handed over to special computer systems for further processing. Back comes a data packet in which every 20 meters, an exact position is entered. The laying vessel can now control exactly the positions that were defined in the first drawing.

Far more than 1000 ships with DPS.
If the DPS is activated on a ship, the compensation of the side forces (wind and current) acting on the ship takes place with the help of its own propeller pods and propellers. Viewpoint reference sensors, combined with wind sensors, motion detectors, and gyroscopes, provide a computer program with information about the ship’s position and lateral forces’ strength and direction.
The computer program contains a mathematical model of the ship, which contains information about the current wind, waves, and the position of the ship’s engines. From this data and the sensor information, the program calculates the thrusters’ steering angles and their thrust to compensate for the movement.
Dynamic positioning can either be absolute, then the ship is held at a fixed point above the ground, or relative to a moving object such as a ship or submersible. You can also keep the ship at a favorable angle to wind direction, waves, and current. An application together with an anchor system is possible.







